




全自动码垛机的输送带方向跑偏时要如何解决,当输送皮带方向跑偏时,带促进立锥辊,使固定不动在锥辊的座叉偏移一个视角,经拨销推动横销靠向侧托辊内孔挡块,侧辊被制动系统,输送皮带与其造成滚动摩擦使托辊组架绕竖轴旋转一个视角,使带调向管理中心。选用新式的力调心托辊架组新式力调心托辊架组构造与传统式商品类似,保存原旋转组织、主梁。托辊改成了几个构造,两侧立辊改成锥型辊,与此同时加设固定不动锥型辊的座叉、托辊内孔的挡块及其锥辊下的横销。







码垛机器人的技能保养是指:为了使机械常常处于杰出的技能状态,保证其可靠性,提高工作效率,延伸使用寿命而对机械所采纳的一系列技能措施。其主要内容是以清洁、紧固、光滑和调整为主,并结合相关的查看和检测工作。各类型的机械设备在“使用和保养手册”中都有明确的保养规定。
1、码垛机的润滑零部件特别多,同时不同的部件所添加的油品也不同,要依据使用说明书,进行添加润滑油。如:齿轮齿条,导轨滑块,巨细齿轮,气缸,升降系统,等等,都是需要进行加润滑油的部件。
2、查看升降机,查看油质和油位。因为升降机主要便是依靠液压油来进行升降,所以要仔细查看,同时在查看时禁止交叉工作,避免意外的发生。
3、查看主轴系统,对齿轮齿条,导轨滑块,气缸等部位进行查看,是不是有异响,是不是该润滑。如果有松动的部件,要进行紧固。
4、查看输送机。输送机传送动力不足时要进行修理,发现连接部位有松动,也要进行紧固。
5、查看旋转平台系统。看一下减速机是否有异常,齿轮是否有磨损,发现有磨损的地方,要及时替换。

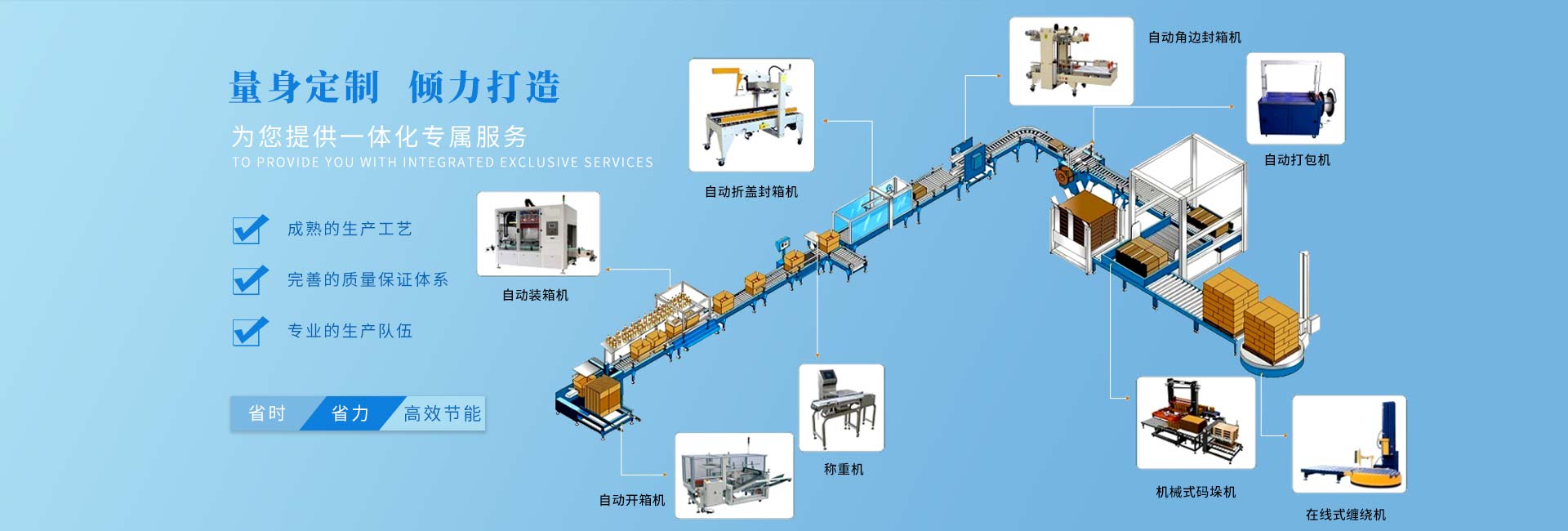
码垛机器人主要主要由执行机构、驱动系统、控制系统以及位置检测装置等所组成。在程序控制的条件下,通过传动方式,来实现执行机构的相应部位发生规定要求的,有顺序,有运动轨迹,有一定速度和时间的动作。
自动码垛机器人的控制系统是通过对机械手每个自由度的电机的控制,来完成特定动作。同时接收传感器反馈的信息,形成稳定的闭环控制。控制系统通常是由单片机或dsp等微控制芯片构成,通过对其编程实现所要功能,运动机构,使手部完成各种转动、移动或运动来实现规定的动作,改变被抓持物件的位置和姿势。


 在线客服
在线客服 13851918388
13851918388 183969645@qq.com
183969645@qq.com


